


ADAPTIVE ROBOT GRIPPER
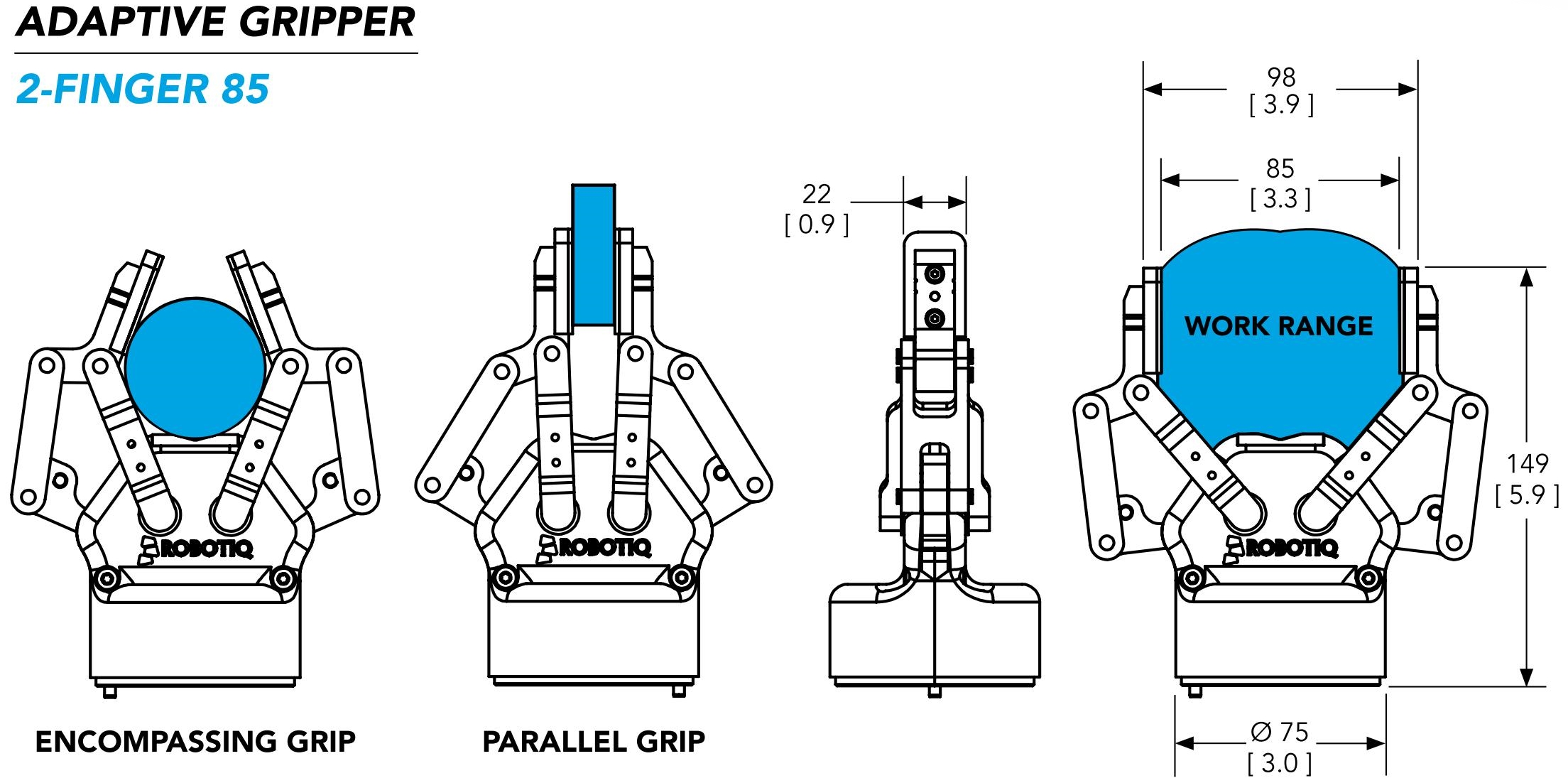
2-FINGER 85 / 140
Eliminate changeovers by using a single programmable robot gripper to handle all your parts.
This robotic end effector is compatible with all major industrial robot manufacturers. No need to design, fabricate and maintain a lot of custom made tools.
Model 2-Finger 85 can grip 85mm wide object while 2-Finger 140 can grip up to 140mm wide.


Features:
Easy Installation – Everything you’ll need for a quick installation from hardware to software.
Easy Programming – Ready-made gripper programming templates for Universal Robots.
Get the Most out of Your Robot – This robot and gripper team thrives on fast set up runs and flexibility.

Mechanical Specifications
| Model | 2-Finger 85 | 2-Finger 140 |
| Gripper opening | 0 to 85 mm (3.3in) | 0 to 140mm (5.5 in) |
| Object diameter for encompassing grip | 43mm(1.7in) to 85 mm(3.3in) | 90mm(3.5in) to 140mm(5.5 in) |
| Gripper weight with mechanical coupling | 850g (1.9 lbs) | 1000g (2.2 lbs) |
| Maximum recommended payload | 5 kg (11 lbs) | 2.5 kg (5.5 lbs) |
| Grip force | 60N(13.5 lbf) to 200N(45 lbf) | 10N(2.2 lbf) to 110N (24.7 lbf) |
| Closing speed | 20 mm/s(0.8in/s) to 150 mm/s(5.9 in/s) | 30 mm/s (1.2in/s) to 250mm/s (9.8 in/s) |
| Operating temperature | -10deg C (14deg F) to 50deg C (122deg F) | -10deg C (14deg F) to 50deg C (122deg F) |
| Parallel grip repeatability | 0.05 mm (0.002 in) | 0.08 mm (0.003 in) |
Electrical Specifications
| Nominal supply voltage | 24 VDC +/- 10% |
| Absolute maximum supply voltage | 28 VDC |
| Quiescent power (minimum power consumption) | < 1 W |
| Peak current | 1 A |
Control
| Communication protocol | Modbus RTU (RS-485, Half duplex) |
| Communication protocol options with controller | Ethernet/IP, TCP/IP, DeviceNet, CANopen, EtherCAT, Modbus RTU (USB) |
| Programmable gripping parameters | Position, speed and force control |
| Status LED | Power, communication and fault status |
| Feedback | Grip detection, gripper position and motor current |